 Skip to content
Skip to contentTracking of every vehicle
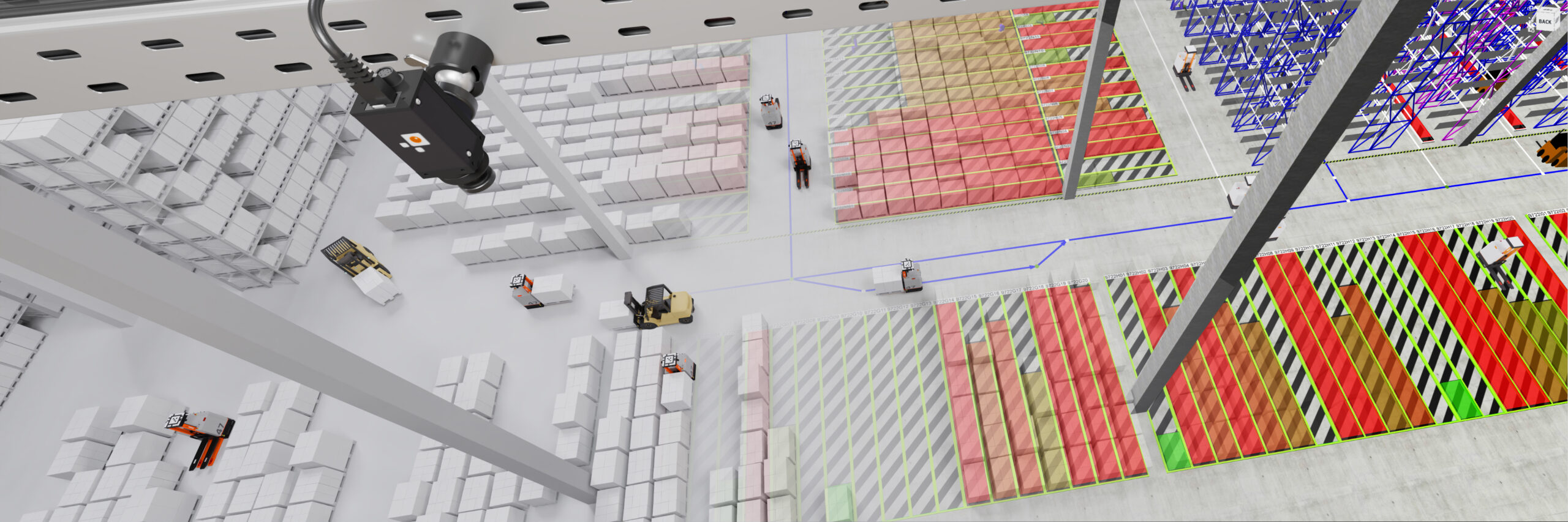
W2MO AI RTL&RS offers a comprehensive solution for tracking the movements of vehicles in a warehouse. The recognition units in the warehouse identify the positions of vehicles and their movements, which are then transferred to the Digital Twin. This solution is suitable for tracking any type of transporter, with no need for alterations to the vehicles. It is also easily integrated with all types of robots, as there is no requirement for an interface for position reporting.
Loading status detection

The loading status of all your transporters can be detected by the recognition units. Pre-trained models detect the status of standard forklifts, and different vehicle types can be trained during an implementation project. This allows you to detect the loading status for all kinds of vehicles, regardless of whether they are manual or automatic, without having to place a sensor onto the vehicle.
Detailed Reports and Heatmaps
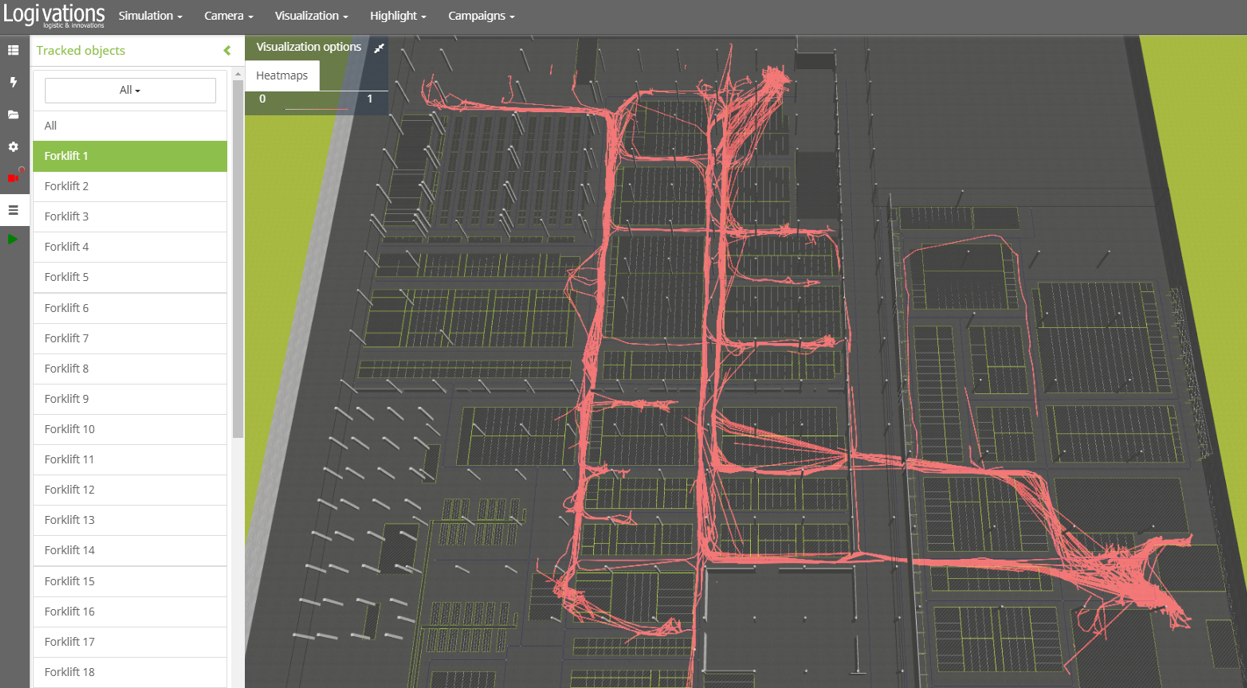
As all transports are tracked, the tracking data can be stored and evaluated. Reports provide information on positions, driven distances, speeds, idle times and loading states and various combinations of this. Evaluations are continuously recalculated based on the latest tracking data. Additionally, heat maps in 3D can be utilized to visualize the tracking information in conjunction with the physical layout of your warehouse.
Order management
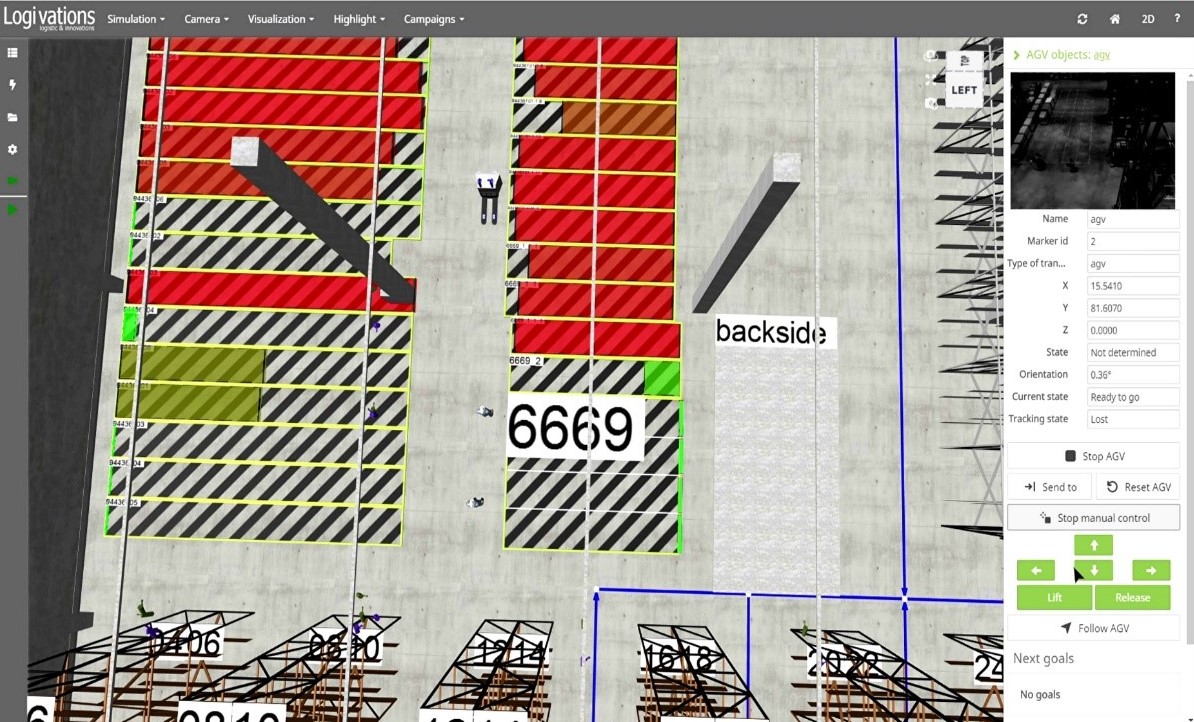
W2MO detects changes in the area usage, new fill levels or optical signals and can automatically generate the necessary transport orders. The transport orders are then optimally distributed to the appropriate transport options. The use of conveyors, forklifts, AGVs, robots, etc. is optimized according to their characteristics and capabilities and the most efficient use possible. Unnecessary travel is minimized. Tour formation or routings are also optimized. W2MO algorithms individually calculate the most efficient route for each order and navigate all transporters (e.g. AGVs) taking into account traffic jams, obstacles, permissible speeds, etc.
The W2MO fleet management contains all the necessary tools to manage transports: Routes can be defined quickly and easily, transport orders can be managed and executed and deadlocks can be avoided. Intelligent alarm and traffic management is also included.
Existing AGVs or AGVs from new manufacturers only need a simple interface to receive transport orders. Every AGV system offers an “order entry” – without such an interface, the system could not work even today. An interface to get the current location or status of the controlled AGVs is not necessary, since the locations of all transporters are already known by the W2MO RTL&RS. The load status of the forklifts or AGVs can be estimated based on the distance traveled and the quantities transported. Therefore, we support VDA 5050 but it is is not required. All AGVs and robots can be integrated with minimal effort, no approval from the AGV-supplier required.
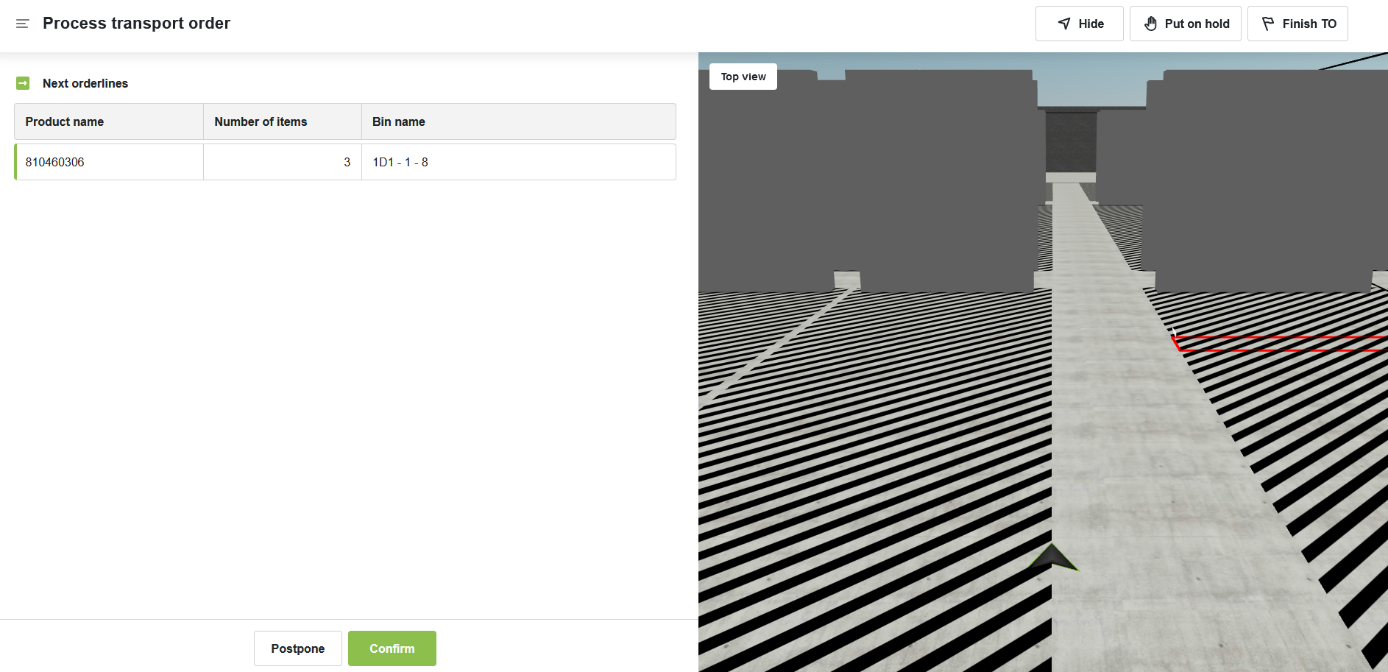
The W2MO onboard navigation interface is available for all devices that support a modern browser. The optimal route is calculated by intelligent algorithms in the Digital Twin. Real-time data from the RTL&RS is also used to avoid traffic jams. Blocked paths or other obstacles are also taken into account in real time. Collision warnings can also be activated.
An employee is navigated from the current position to the destination via the UI, with the remaining time and distance to the destination updated in real time. A pick / put dialog is also integrated. This is automatically activated depending on the current position.
Numerous productivity reports are available for the control center. These reports also support a quick and easy approach to fleet optimization.
Battery management for autonomous robots
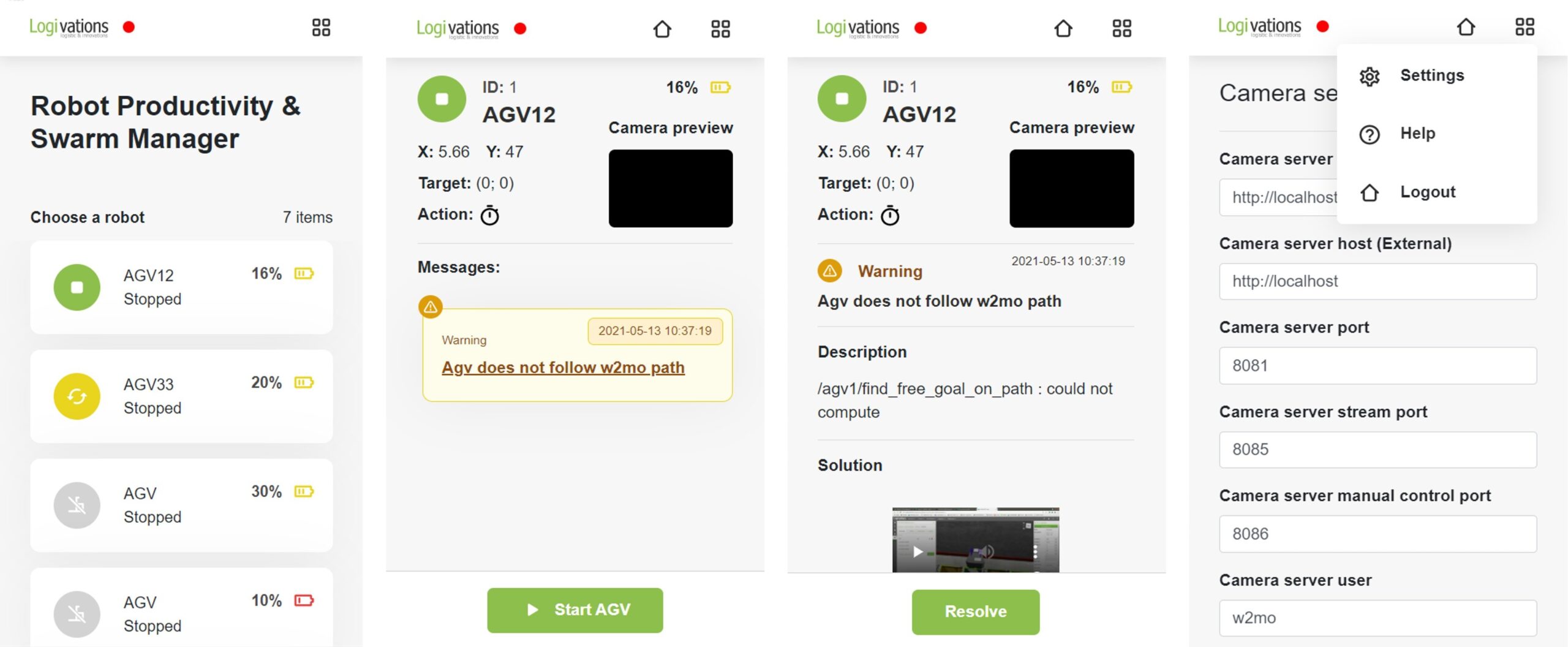
Battery management for autonomous transport robots is important to reduce costs and increase efficiency. W2MO offers all the options: charging can be initiated either automatically or manually. Depending on the charging time and capacity, the battery can be fully or partially charged to bridge the time until the next charging process. By briefly recharging the battery during breaks, a robot with a limited battery capacity can be used 24/7. When a robot reaches its minimum battery level, it ends its job and automatically moves to an available charging station. It is also possible to manually start recharging at the push of a button. The robots automatically returns to the work area after being fully or partially charged. Battery status is easily monitored via the operator interface.
Integration with SAP WM / SAP EWM
As a long-standing SAP application development partner, Logivations has already implemented many SAP interfaces. This experience can also be used for the warehouse control system. In addition to a wide range of integration options for the optimization algorithms in SAP (e.g. for calculating the optimal storage bin), the Real Time Location & Recognition System can also bring considerable added value to your SAP.
Forget about numerous scans that are required for SAP feedback. W2MO automatically records the movements of your goods based on activity and transfers them to SAP. This enables you to achieve significant increases in productivity.