 Zum Inhalt springen
Zum Inhalt springenTracking aller Fahrzeuge
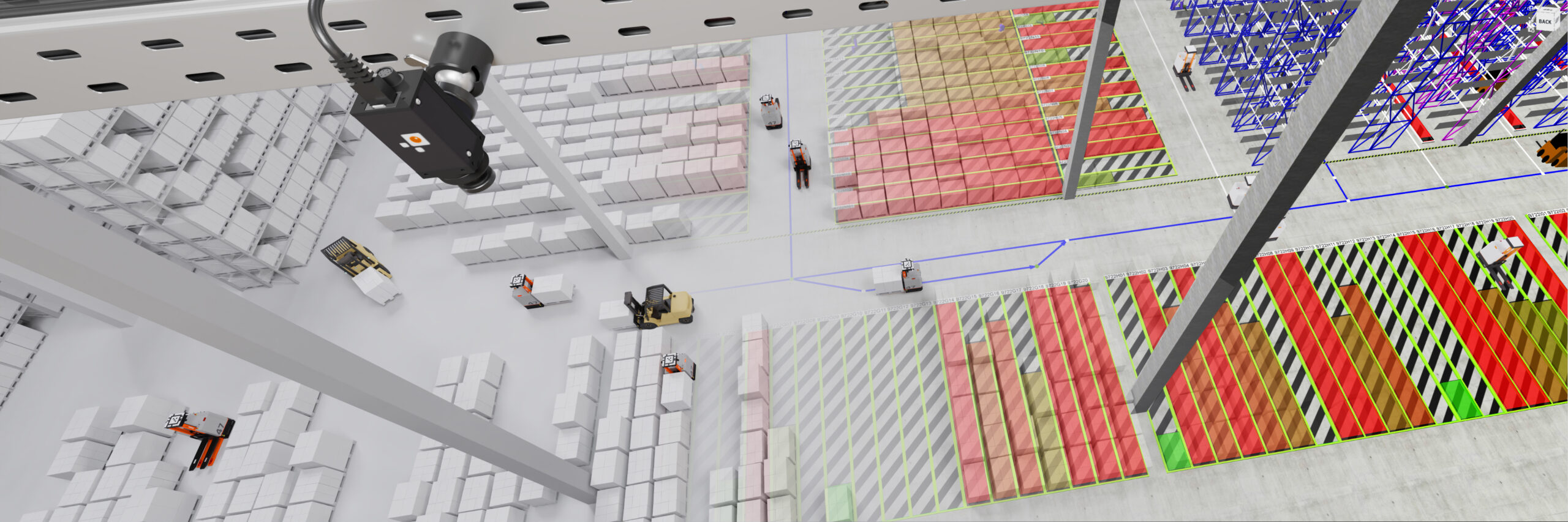
W2MO AI RTL&RS bietet eine Komplettlösung für die Verfolgung von Fahrzeugbewegungen in einem Lager. Die Erkennungseinheiten im Lager identifizieren die Positionen der Fahrzeuge und ihre Bewegungen, die dann an den digitalen Zwilling übertragen werden. Diese Lösung eignet sich für die Verfolgung aller Arten von Transportfahrzeugen, ohne dass Änderungen an den Fahrzeugen vorgenommen werden müssen. Sie lässt sich auch leicht für alle Arten von Robotern integrieren, da keine Schnittstelle für die Positionsmeldung erforderlich ist.
Ladezustandserkennung

Der Beladungszustand all Ihrer Gabelstapler kann von den Erkennungseinheiten erkannt werden. Vorgefertigte Modelle erkennen den Status von Standard-Gabelstaplern und verschiedene Fahrzeugtypen können während eines Implementierungsprojekts trainiert werden. Auf diese Weise können Sie den Beladungszustand für alle Fahrzeugtypen erkennen, unabhängig davon, ob es sich um manuelle oder automatische Fahrzeuge handelt, ohne dass ein Sensor am Fahrzeug angebracht werden muss.
Ausführliche Auswertungen und Heatmaps
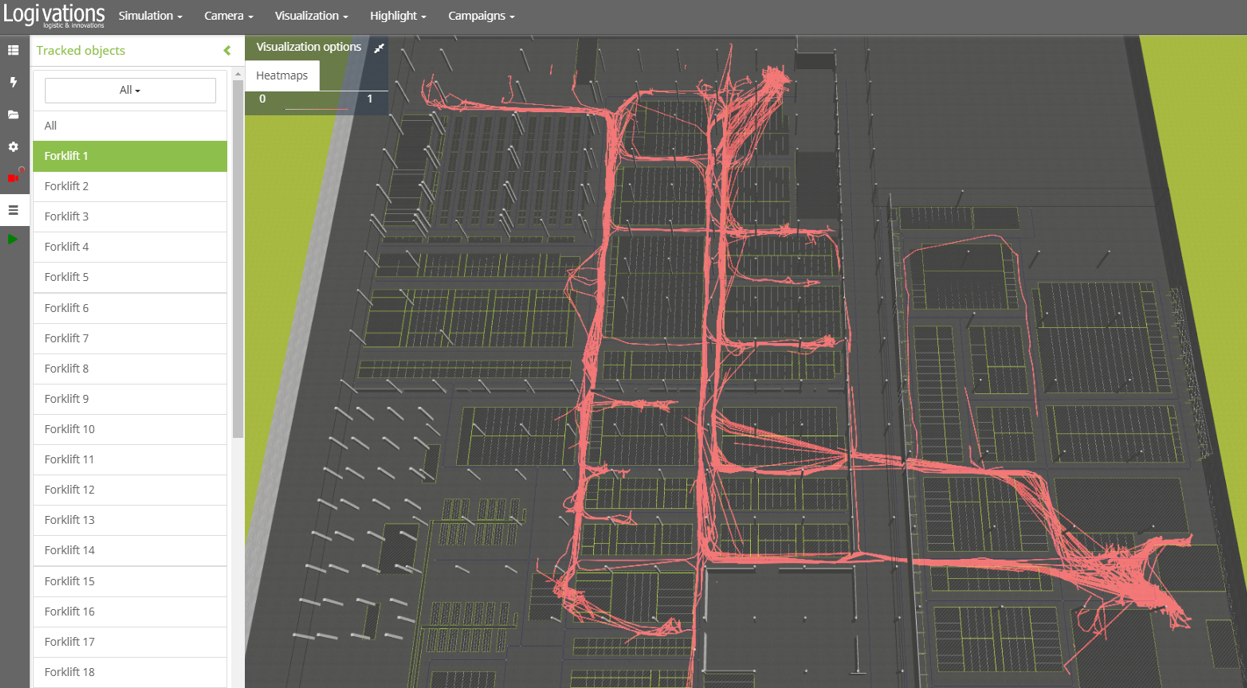
Da alle Transporte verfolgt werden, können die Trackingdaten gespeichert und ausgewertet werden. Auswertungen geben Auskunft über Positionen, gefahrene Strecken, Geschwindigkeiten, Standzeiten und Beladungszustände sowie verschiedene Kombinationen daraus. Die Auswertungen werden laufend auf Basis der aktuellen Trackingdaten neu berechnet. Zusätzlich können 3D-Heatmaps verwendet werden, um die Tracking-Informationen in Verbindung mit dem physischen Layout Ihres Lagers zu visualisieren.
Auftragsmanagement
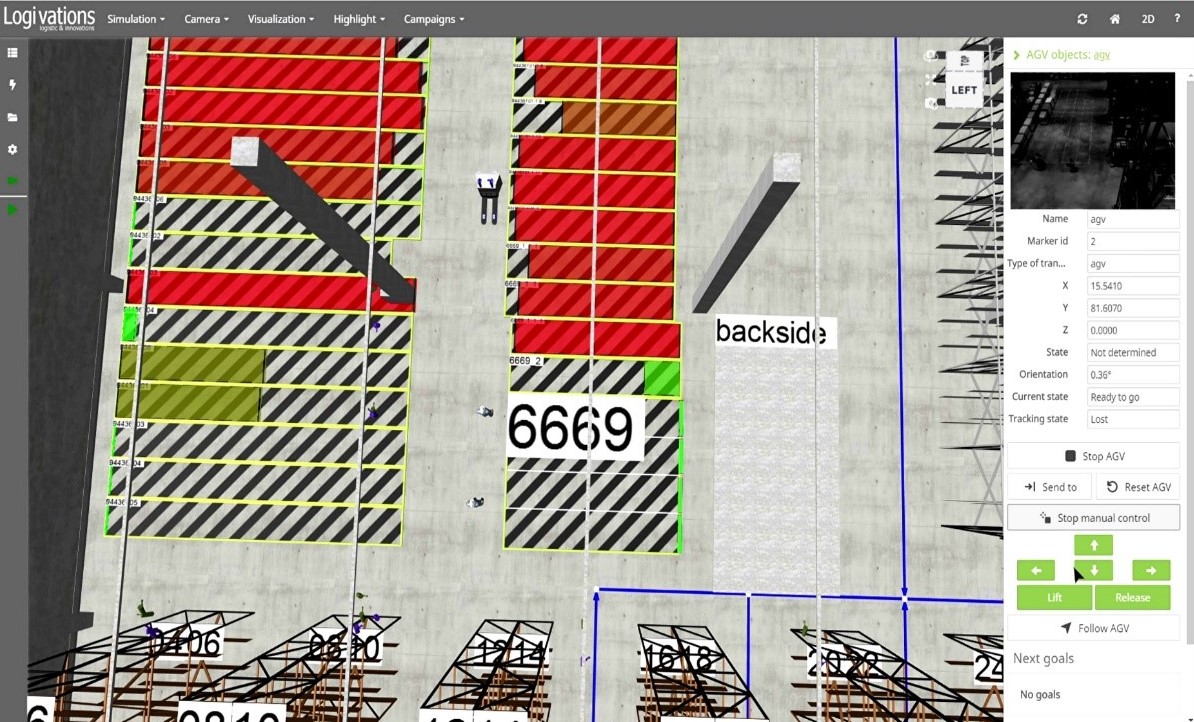
W2MO erkennt Änderungen in der Flächenbelegung, neue Füllstände oder optische Signale und kann die notwendigen Transportaufträge automatisch generieren. Die Transportaufträge werden dann optimal auf die geeigneten Transportmittel verteilt. Der Einsatz von Fördertechnik, Staplern, FTS, Robotern etc. wird entsprechend der jeweiligen Eigenschaften und Fähigkeiten optimiert und so effizient wie möglich genutzt. Unnötige Fahrten werden auf ein Minimum reduziert. Die Tourenbildung bzw. das Routing wird ebenfalls optimiert. Die W2MO-Algorithmen berechnen für jeden Auftrag individuell die effizienteste Route und navigieren alle Transportmittel (z.B. FTS) dynamisch unter Berücksichtigung von Staus, Hindernissen, zulässigen Geschwindigkeiten etc.
Das W2MO Flottenmanagement enthält alle notwendigen Werkzeuge, um Transporte zu verwalten: Einfach und schnell können Routen definiert, Transportaufträge verwaltet und durchgeführt sowie Blockaden vermieden werden. Ein intelligentes Alarm- und Verkehrsmanagement ist selbstverständlich.
Bestehende FTS oder FTS neuer Hersteller benötigen nur eine einfache Schnittstelle, um Transportaufträge zu empfangen. Jedes FTS-System bietet eine „Auftragseingabe“ - ohne eine solche Schnittstelle könnte das System auch heute nicht funktionieren. Eine Schnittstelle zur Erfassung des aktuellen Standortes oder Zustandes der gesteuerten FTS ist nicht notwendig, da die Standorte aller Fahrzeuge bereits durch das W2MO RTL&RS erfasst werden. Der Beladungszustand der Stapler oder FTS kann anhand der gefahrenen Strecke und der transportierten Mengen gut abgeschätzt werden.
Die W2MO-Onboard-Navigation ist für alle Geräte verfügbar, die einen modernen Browser unterstützen. Die optimale Route wird durch intelligente Algorithmen im digitalen Zwilling berechnet. Dabei werden auch Echtzeitdaten des RTL&RS genutzt, um Staus zu umfahren. Blockierte Fahrwege oder andere Hindernisse werden ebenfalls in Echtzeit berücksichtigt. Zusätzlich können Kollisionswarnungen aktiviert werden.
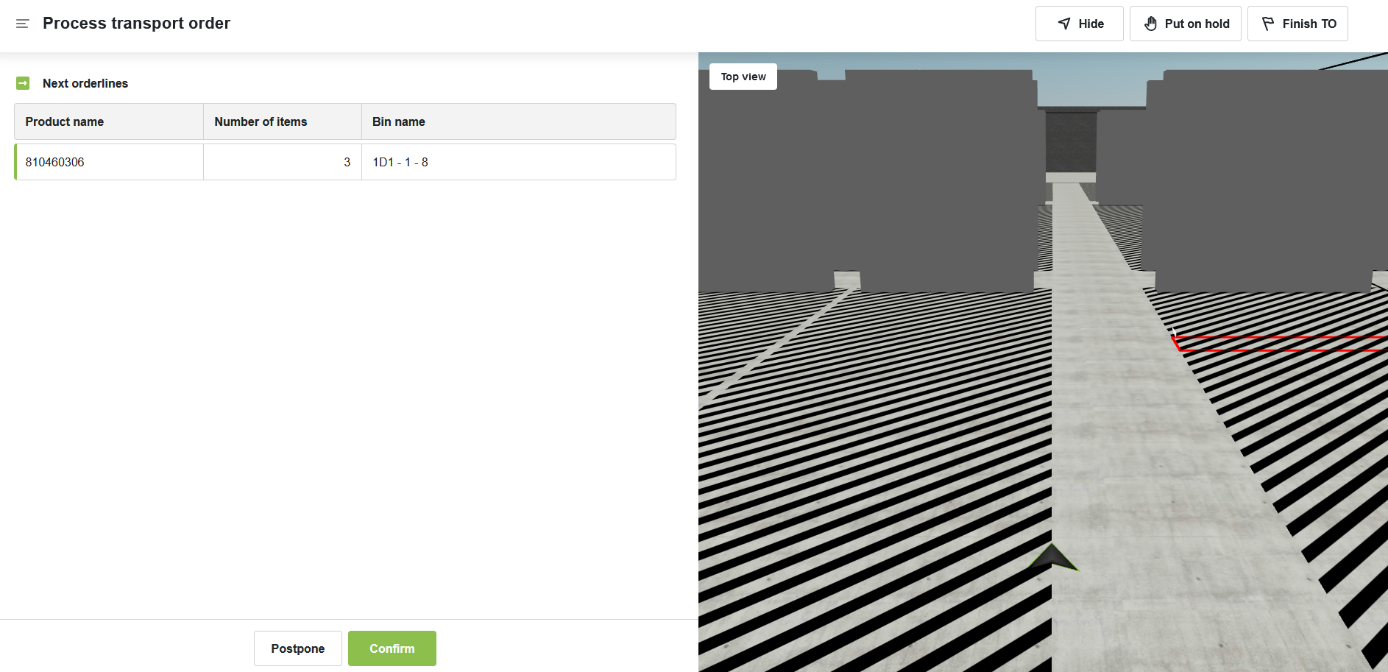
Der Mitarbeitende wird über ein UI von der aktuellen Position zum Ziel navigiert, wobei die verbleibende Zeit und die Entfernung zum Ziel ständig aktualisiert werden. Ein Pick/Put-Dialog ist ebenfalls integriert. Dieser wird abhängig von der Position direkt aktiviert.
Für den Leitstand stehen zahlreiche Produktivitätsauswertungen zur Verfügung, die einen schnellen und einfachen Ansatz zur Flottenoptimierung unterstützen.
Batteriemanagement für Autonome Roboter
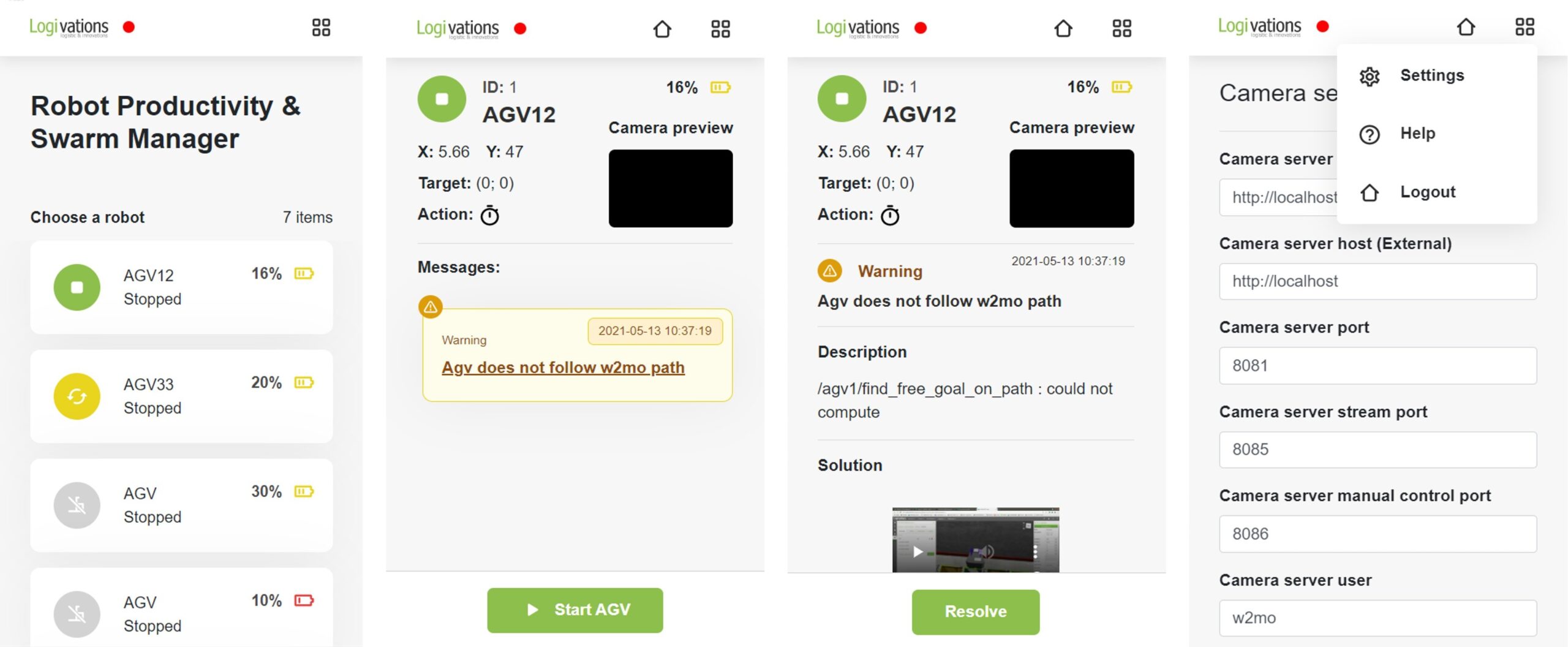
Batteriemanagement für autonome Transportroboter ist wichtig, um Kosten zu senken und die Effizienz zu steigern. W2MO bietet alle Möglichkeiten: Der Ladevorgang kann automatisch oder manuell gestartet werden. Je nach Ladezeit und Kapazität kann die Batterie vollständig oder teilweise geladen werden, um die Zeit bis zum nächsten Ladevorgang zu überbrücken. Durch kurzes Nachladen der Batterie in den Pausen kann ein Roboter mit begrenzter Batteriekapazität rund um die Uhr eingesetzt werden. Erreicht ein Roboter seine minimale Batteriekapazität, beendet er seine Aufgabe und fährt automatisch zu einer verfügbaren Ladestation. Der Ladevorgang kann auch manuell per Knopfdruck gestartet werden. Nach vollständiger oder teilweiser Aufladung kehren die Roboter automatisch in ihren Arbeitsbereich zurück. Der Ladezustand der Batterie kann einfach über die Bedienoberfläche überwacht werden.
Integration zu SAP WM / SAP EWM
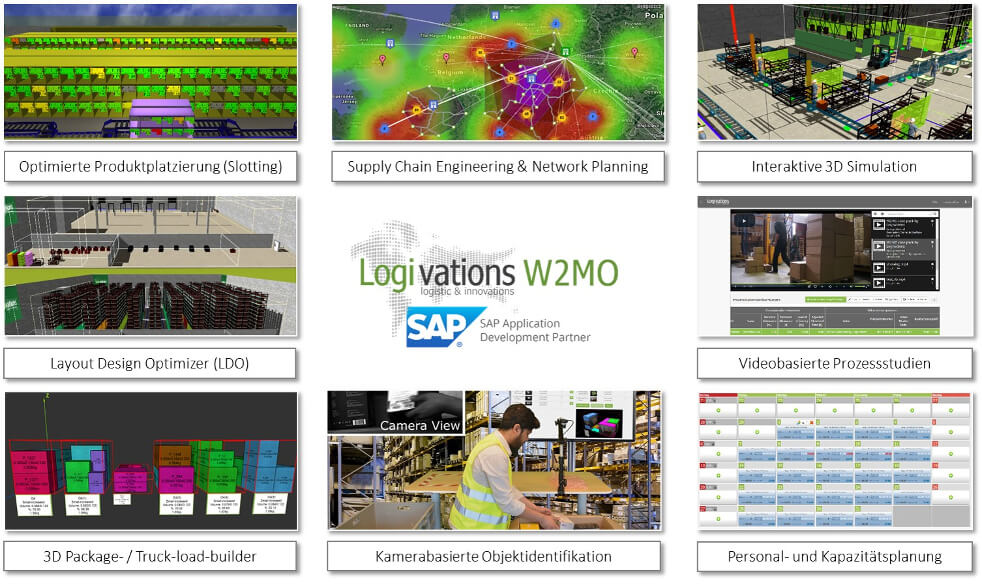
Als langjähriger SAP Application Development Partner hat Logivations bereits viele SAP Schnittstellen realisiert. Diese Erfahrung kann auch für das Warehouse Execution System genutzt werden. Neben den vielfältigen Integrationsmöglichkeiten der Optimierungsalgorithmen in SAP, z.B. zur Berechnung des optimalen Lagerfachs, kann das Real Time Location & Recognition System auch einen erheblichen Mehrwert für Ihr SAP bieten.
Sparen Sie sich die vielen Scans für die Rückmeldungen an SAP. W2MO verbucht Ihre Warenbewegungen automatisch anhand der Bewegungen und übergibt diese an SAP. Dadurch erreichen Sie erhebliche Produktivitätssteigerungen.