Flottenmanagement.
Ein ganzheitliches Flottenmanagement für Roboter und manuelle Fahrzeuge auf der Grundlage des AI-RTL&RS — Echtzeit-Tracking, Ladezustandserkennung, optimale Auftragsverteilung, Onboard-Navigation, Batteriemanagement und SAP-Integration in einer Plattform.
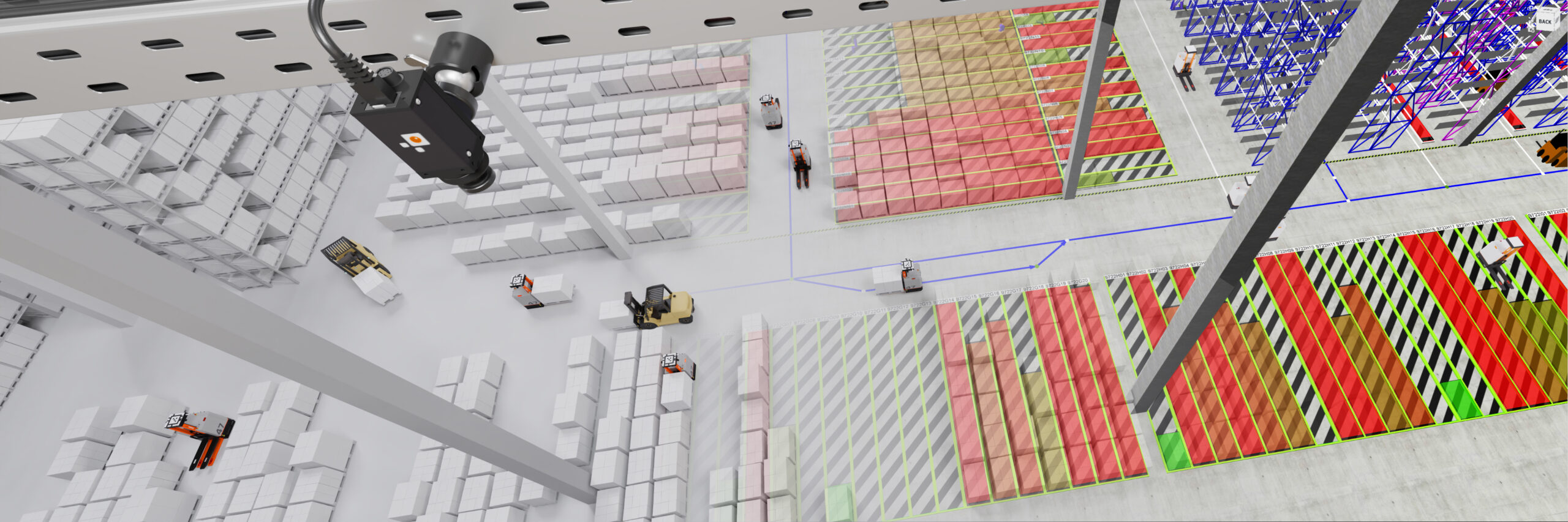
Tracking aller Fahrzeuge.
W2MO AI-RTL&RS bietet eine Komplettlösung für die Verfolgung von Fahrzeugbewegungen in einem Lager.
- Echtzeit-Lokalisierung aller Fahrzeuge — manuell oder automatisch
- Keine Veränderung des Fahrzeugs und der Schnittstelle zu den Robotern erforderlich
- Vermeidung von Scanvorgängen
Ladezustandserkennung.
Automatische Erkennung des Ladezustands — ganz ohne Sensor am Fahrzeug.
- Automatische Erkennung des Ladezustands
- Kein Sensor am Fahrzeug erforderlich
- Für manuelle und automatisierte Fahrzeuge

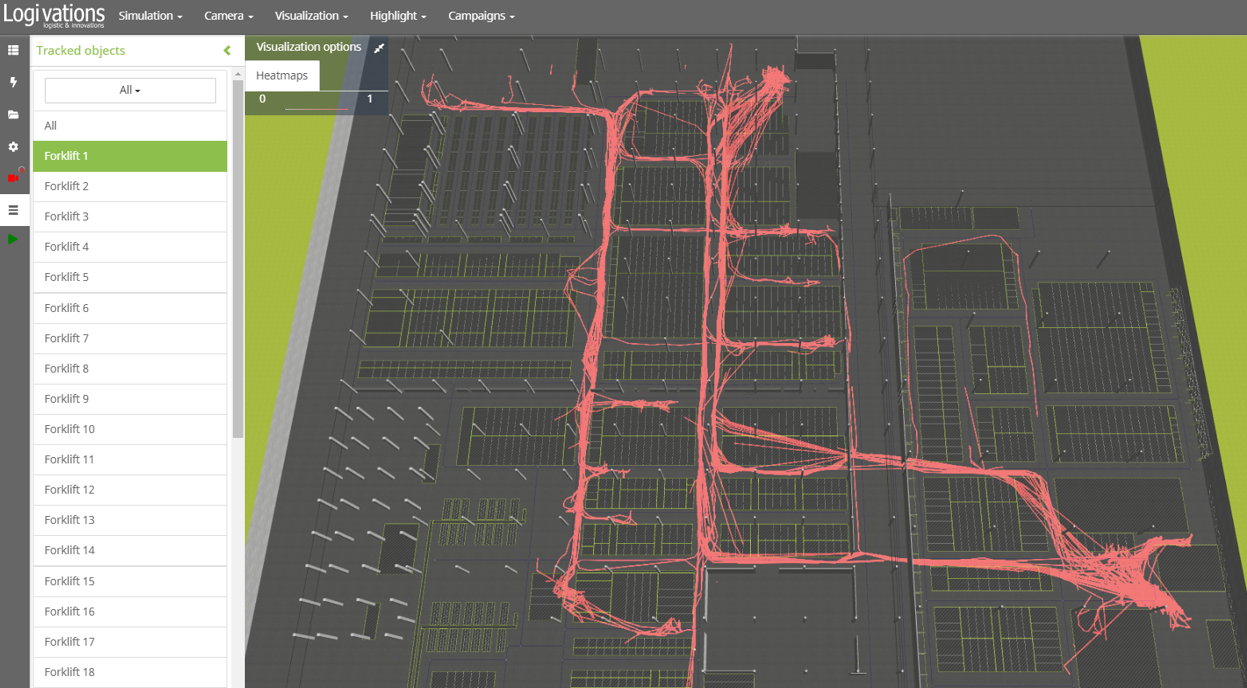
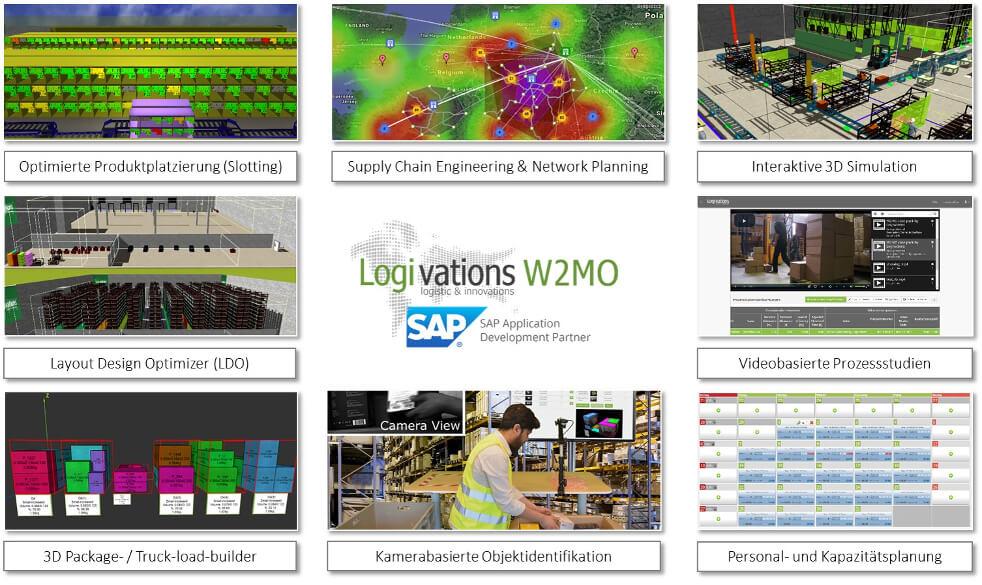
Ausführliche Auswertungen & Heatmaps.
Jeder Transport wird verfolgt, gespeichert und ausgewertet — visualisiert in 3D auf Ihrem physischen Layout.
- Auswertung von Positionen, Geschwindigkeiten, Leerlauf- und Produktivzeiten
- Analyse des Beladungszustands
- Visuelle Darstellung in 3D
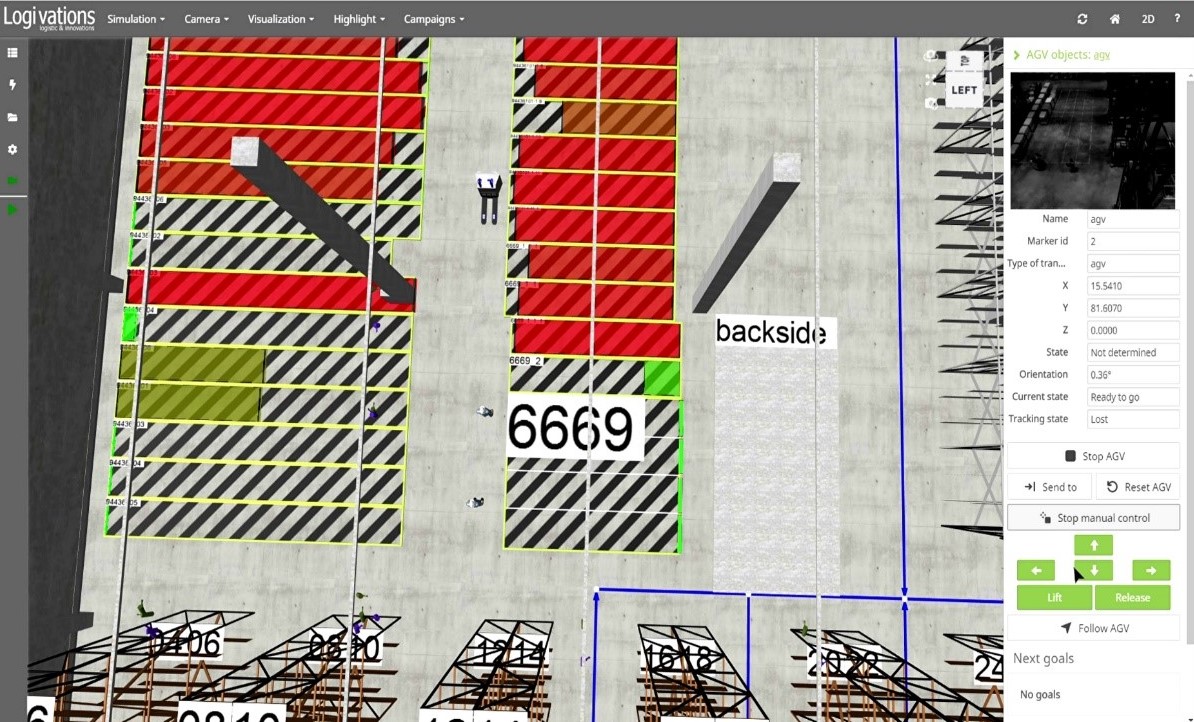
Auftragsmanagement.
Automatische Generierung und optimierte Verteilung von Transportaufträgen über Ihre gesamte Flotte hinweg.
- Automatische Generierung von Transportaufträgen anhand von Flächenbelegungen, Füllständen oder visuellen Signalen
- Optimierte Zuteilung von Transportaufträgen an die besten Transportmöglichkeiten
- Optimale Routenführung durch globalen Überblick
- Vorgabe von Transportwegen, Geschwindigkeitsbegrenzungen etc.
- Pick- und Put-Dialoge
- Lastvorschau in Echtzeit
- VDA 5050 unterstützt, aber nicht benötigt
W2MO erkennt Änderungen in der Flächenbelegung, neue Füllstände oder optische Signale und kann die notwendigen Transportaufträge automatisch generieren. Die Transportaufträge werden dann optimal auf die geeigneten Transportmittel verteilt. Der Einsatz von Fördertechnik, Staplern, FTS, Robotern etc. wird entsprechend der jeweiligen Eigenschaften und Fähigkeiten optimiert und so effizient wie möglich genutzt. Unnötige Fahrten werden auf ein Minimum reduziert. Die Tourenbildung bzw. das Routing wird ebenfalls optimiert. Die W2MO-Algorithmen berechnen für jeden Auftrag individuell die effizienteste Route und navigieren alle Transportmittel (z. B. FTS) dynamisch unter Berücksichtigung von Staus, Hindernissen, zulässigen Geschwindigkeiten etc.
Das W2MO Flottenmanagement enthält alle notwendigen Werkzeuge, um Transporte zu verwalten: Einfach und schnell können Routen definiert, Transportaufträge verwaltet und durchgeführt sowie Blockaden vermieden werden. Ein intelligentes Alarm- und Verkehrsmanagement ist selbstverständlich.
Bestehende FTS oder FTS neuer Hersteller benötigen nur eine einfache Schnittstelle, um Transportaufträge zu empfangen. Jedes FTS-System bietet eine „Auftragseingabe“ — ohne eine solche Schnittstelle könnte das System auch heute nicht funktionieren. Eine Schnittstelle zur Erfassung des aktuellen Standortes oder Zustandes der gesteuerten FTS ist nicht notwendig, da die Standorte aller Fahrzeuge bereits durch das W2MO RTL&RS erfasst werden. Der Beladungszustand der Stapler oder FTS kann anhand der gefahrenen Strecke und der transportierten Mengen gut abgeschätzt werden.
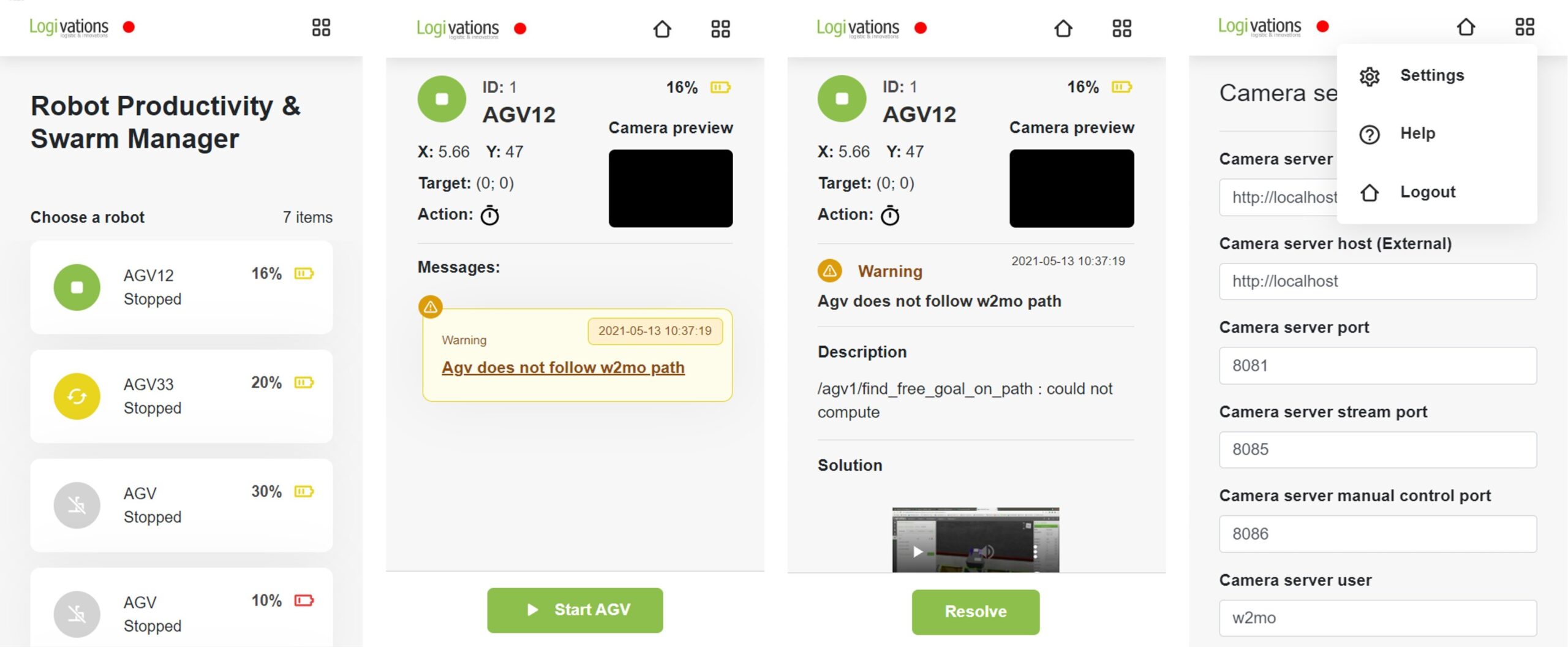
Staplernavigation.
Onboard-Navigation mit Echtzeit-Stauvermeidung — auf jedem Gerät mit modernem Browser.
- Onboard Navigation
- Optimale Routenführung
- Echtzeit-Stauvermeidung
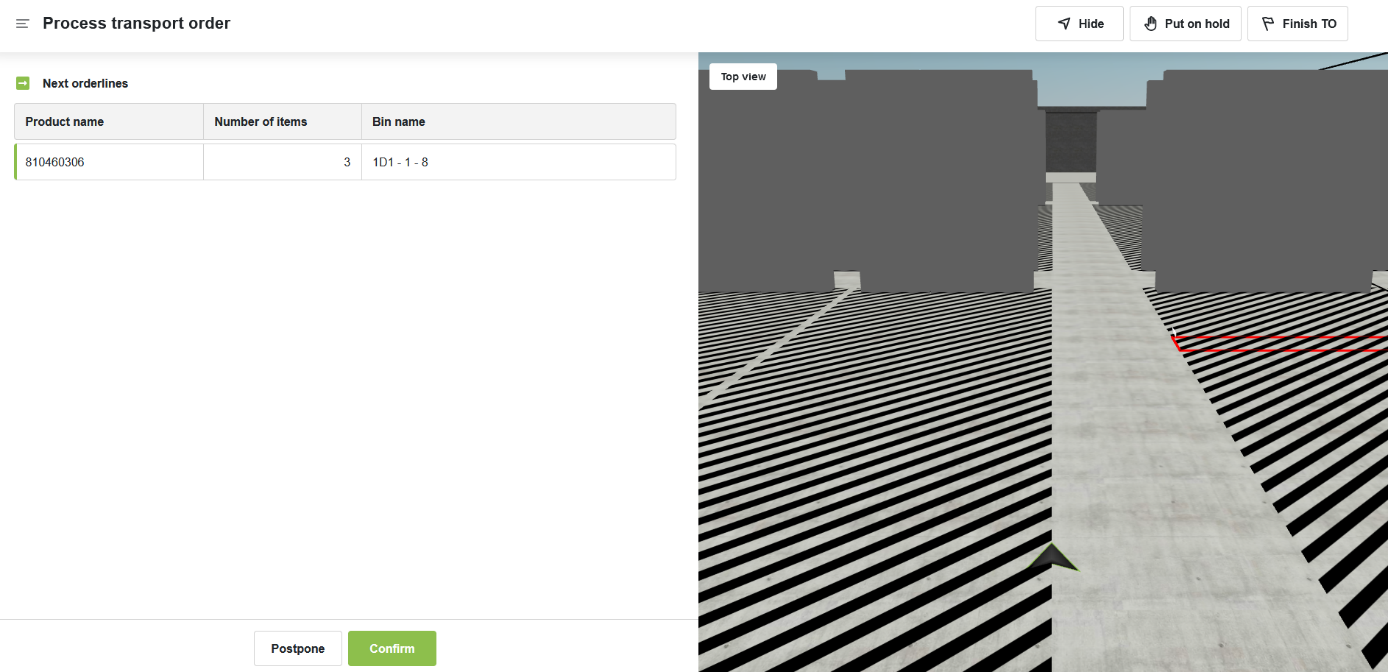
Die W2MO-Onboard-Navigation ist für alle Geräte verfügbar, die einen modernen Browser unterstützen. Die optimale Route wird durch intelligente Algorithmen im digitalen Zwilling berechnet. Dabei werden auch Echtzeitdaten des RTL&RS genutzt, um Staus zu umfahren. Blockierte Fahrwege oder andere Hindernisse werden ebenfalls in Echtzeit berücksichtigt. Zusätzlich können Kollisionswarnungen aktiviert werden.
Der Mitarbeitende wird über ein UI von der aktuellen Position zum Ziel navigiert, wobei die verbleibende Zeit und die Entfernung zum Ziel ständig aktualisiert werden. Ein Pick/Put-Dialog ist ebenfalls integriert. Dieser wird abhängig von der Position direkt aktiviert.
Für den Leitstand stehen zahlreiche Produktivitätsauswertungen zur Verfügung, die einen schnellen und einfachen Ansatz zur Flottenoptimierung unterstützen.
Batteriemanagement für autonome Roboter.
Niedrigere Kosten und höhere Verfügbarkeit durch intelligente Ladestrategien.
- Automatischer Ladestart
- Nutzung von Teilladung zur Erhöhung der Verfügbarkeit
- Moderner Leitstand für mobile Endgeräte
Integration zu SAP WM / SAP EWM.
Scans durch Echtzeit-Positionsbuchungen ersetzen — und Optimierungsalgorithmen in SAP integrieren.
- Vermeidung von Scans durch Buchung über Echtzeitposition
- Integration von Optimierungsalgorithmen
Als langjähriger SAP Application Development Partner hat Logivations bereits viele SAP Schnittstellen realisiert. Diese Erfahrung kann auch für das Warehouse Execution System genutzt werden. Neben den vielfältigen Integrationsmöglichkeiten der Optimierungsalgorithmen in SAP, z. B. zur Berechnung des optimalen Lagerfachs, kann das Real Time Location & Recognition System auch einen erheblichen Mehrwert für Ihr SAP bieten.
Sparen Sie sich die vielen Scans für die Rückmeldungen an SAP. W2MO verbucht Ihre Warenbewegungen automatisch anhand der Bewegungen und übergibt diese an SAP. Dadurch erreichen Sie erhebliche Produktivitätssteigerungen.
Interesse an W2MO Flottenmanagement?
Sprechen Sie mit unseren Expertinnen und Experten — unverbindlich.